ÍPśI‘~:īůČőį≤»ęĪOúy;ňģ∆ĹőĽ“∆;īĻ÷ĪőĽ“∆;»żĺSőĽ“∆;ėO◊Ýėň∑®;ĺŗŽxĹĽēĢ∑®;GPS ∑®;◊‘Ą”ĪOúyŌĶĹy
’™°°“™:Õ‚≤Ņ◊É–ő”^úy «īůČőį≤»ęĪOúyŌĶĹyĶń÷ō“™ĹM≥…≤Ņ∑÷°£ńŅ«į≥£”√ĶńĪOúy∑Ĺ∑®÷ų“™”–: ĘŔňģ∆ĹőĽ“∆ĪOúyĶń“ēú ĺÄ∑®°Ę“żŹąĺÄ∑®°Ęľ§Ļ‚ú ÷Ī∑®°Ę’żĶĻīĻĺÄ∑®°Ęĺę√‹ĆßĺÄ∑®ļÕ«į∑ĹĹĽēĢ∑®; ĘŕīĻ÷ĪőĽ“∆ĪOúyĶńé◊ļőňģú ∑®°ĘŃųůwžoѶňģú ∑®; ĘŘ»żĺSőĽ“∆ĪOúyĶńėO◊Ýėň∑®°ĘĺŗŽxĹĽēĢ∑®ļÕGPS ∑®°£»żĺSőĽ“∆ĪOúyŌĶĹyŅ…ĆćērŖBņm”^úy◊É–őŁcĶńňģ∆ĹőĽ“∆ļÕīĻ÷ĪőĽ“∆°£úyŃŅôC∆ų»ň◊‘Ą”ĪOúyŌĶĹy‘ŕ–°ņňĶ◊īůČő≥…Ļ¶Ď™”√,Ćć¨FŃňīůČőÕ‚≤Ņ◊É–őĪOúyĶń»ę◊‘Ą”ĽĮ°£ŽS÷ÝŅ∆ľľĶń≤ĽĒŗįl’Ļ,īůČőį≤»ęĪOúy◊‘Ą”ĽĮŌĶĹy“Ľ∂®ēĢłŁľ”ÕÍ…∆°£
īůČőÕ‚≤Ņ◊É–őĪOúy «īůČőį≤»ęĪOúyĶń÷ō“™É»»›,¨F”–łų∑Nłųė”ĶńĪOúy∑Ĺ∑®°£üo’ď≤…”√ńń∑N∑Ĺ∑®,∂ľĪōŪöĚM◊„ĺę∂»“™«ů°£»Á‘ŕ°∂ĽžńżÕŃīůČőį≤»ęĪOúyľľ–g“é∑∂°∑(1989 ńÍĆć ©) ÷–“é∂®,÷ōѶČő°Ę÷ß∂’ČőĶńČőůwňģ∆ĹőĽ“∆ĺę∂»ěť±1 mm ,ČőĽýěť±013 mm ,ňý”–ĽžńżÕŃČőĶńČőůwľįČőĽýĶńīĻ÷ĪőĽ“∆Ķńĺę∂»“™«ůěť±1 mm ,ČőĽýÉA–ĪĶńĺę∂»“™«ůěť±1″°£Ŗ@–©“é∂®Ć¶ĪOúyĻ§◊ųŐŠ≥ŲŃňĪ»›^łŖĶń“™«ů°£ĶęŹńĆćŽH«ťõrĀŪŅī,Ŗ@–©“™«ů“Ľį„÷Ľ «∑ŻļŌį≤»ęĶń◊ÓĶÕ÷Ķ,ĆćŽH≤Ŕ◊ų÷–Ď™‘ďĪ»“é∑∂Ķń“™«ůłŁłŖ,Ŗ@üo“…‘Ųľ”ŃňúyŃŅĻ§◊ųĶńŽy∂»°£
īůČőÕ‚≤Ņ◊É–őĪOúyĶńŪóńŅ“Ľį„∑÷ěť:ňģ∆ĹőĽ“∆ĪOúy°ĘīĻ÷ĪőĽ“∆ĪOúy°Ę»żĺSőĽ“∆ĪOúy°ĘďŌ∂»ĪOúyļÕÉA–ĪĪOúyĶ»°£
1 °°ňģ∆ĹőĽ“∆ĪOúy
ňģ∆ĹőĽ“∆ĪOúy∑Ĺ∑®”–“ēú ĺÄ∑®,“żŹąĺÄ∑®,ľ§Ļ‚ú ÷Ī∑®,’ż°ĘĶĻīĻĺÄ∑®,ĺę√‹ĆßĺÄ∑®ļÕ«į∑ĹĹĽēĢ∑®Ķ»°£
1.1 °°“ēú ĺÄ∑®
“ēú ĺÄ∑®≥£”√”ŕ÷ĪĺÄ–ÕīůČőĶńňģ∆ĹőĽ“∆”^úy,ƶ”ŕ∑«÷ĪĺÄ–ÕīůČő,Ņ…≤…”√∑÷∂ő“ēú ĺÄĶń∑Ĺ∑® ©úy°£“ēú ĺÄ∑®ĶńŐōŁc «Ļ§≥Ő‘žÉrĶÕ,Ķęĺę∂»ĶÕ,≤Ľ“◊Ćć¨F◊‘Ą””^úy, ‹Õ‚ĹÁólľĢ”įŪĎ›^īů,∂Ý«“◊É–ő÷Ķ(őĽ“∆ėňŁcĶńőĽ“∆ŃŅ) ≤Ľń‹≥¨≥Ų‘ďŌĶĹyĶń◊Óīů∆ęĺŗ÷Ķ,∑ŮĄtüo∑®ŖM––”^úy°£ŐŠłŖ“ēú ĺÄ∑®ĺę∂»ľį◊‘Ą”ĽĮ≥Ő∂»ĶńīŽ ©”–:łńŖM”^úyľľ–gļÕ≤Ŕ◊ų∑Ĺ∑®,Ŗx”√łŖĺę∂»Éx∆ų,»ÁTCA2003 ◊‘Ą”łķŘô»ę’ĺÉx°£
1.2 °°“żŹąĺÄ∑®
“żŹąĺÄ∑®ĶńŐōŁc «≥…ĪĺĶÕ,ĺę∂»łŖ(÷ų“™»°õQ”ŕ◊xĒĶĺę∂»,»ňĻ§◊xĒĶĺę∂»ěť012°ę013 mm ,◊‘Ą”◊xĒĶĺę∂»Éě”ŕ±011mm) , ‹Õ‚ĹÁólľĢ”įŪĎ–°,Ď™”√›^∆’Īť°£◊Ó–¬Ķń“żŹąĺÄúyŃŅŌĶĹy≥£≤…”√ĺÄÍáCCD āųł–∆ų,ń‹Ćć¨F◊‘Ą”◊xĒĶ,∆šŃŅ≥Őěťé◊ņŚ√◊,ĺę∂»Éě”ŕ±1 mm°£“żŹąĺÄ∑®Ķńįl’ĻŕÖĄ› «ŽpŌÚ“żŹąĺÄ,ňŁľ»ń‹ČÚ”^úyňģ∆Ĺ∑ĹŌÚĶńőĽ“∆,”÷ń‹”^úyīĻ÷Ī∑ĹŌÚĶńőĽ“∆,ŐŠłŖŃň”^úy–߬ °£
1.3 °°ľ§Ļ‚ú ÷Ī∑®
1.3.1 °°īůö‚ľ§Ļ‚ú ÷Ī
īůö‚ľ§Ļ‚ú ÷ĪĶńĎ™”√ƶŌů «ČőťL–°”ŕ300 m°ĘČőłŖ›^ĶÕĶńīůČő,úyŃŅŌŗƶĺę∂»ěť10 - 5°ę10 - 6 °£”…”ŕ ‹īůö‚’Ř…šľįÕńŃų”įŪĎēĢ“ż∆ūĻ‚ Ý∂∂Ą”,‘ď∑®úyŃŅĺę∂»ĶÕ«“≤Ľ“◊Ćć¨F◊‘Ą”ĽĮ”^úy°£īůö‚ľ§Ļ‚ú ÷Īľľ–gĶń◊Ó–¬įl’Ļ «≤…”√CCD ľľ–g°£ňŁŌŻ≥żŃňĻ‚įŖŽSôC∂∂Ą”,Ćć¨FŃňĪOúy◊‘Ą”ĽĮ,úyŃŅĺę∂»łŖŖ_±011mm°£īňŪóľľ–g“—≥…Ļ¶ĶōĎ™”√”ŕ“Ľ–©ňģŽäĻ§≥ŐĶń◊É–ő”^úy÷–°£
1.3.2 °°’śŅ’ľ§Ļ‚ú ÷Ī
’śŅ’ľ§Ļ‚ú ÷ĪĺCļŌĺę∂»łŖŖ_(1°ę2) ×10 - 7 ,÷ų“™”√”ŕťLČő°ĘłŖČőĶń◊É–őĪOúy,∆šįl’Ļ∑ĹŌÚ «ŽpŌÚőĽ“∆”^úy(īĻ÷ĪőĽ“∆ļÕňģ∆ĹőĽ“∆) °£ěťŃňÕō’Ļ∆šĎ™”√Ņ’ťg,Ņ…ŅľĎ]Ćć¨F’śŅ’ľ§Ļ‚řDĹ«,“‘Ī„”√”ŕ«ķĺÄ–őīůČőĶń◊É–őĪOúy°£
1.4 °°’żĶĻīĻĺÄ
’ż°ĘĶĻīĻĺÄľ»Ņ…“‘Ćć¨Fňģ∆ĹőĽ“∆ĪOúy,”÷Ņ…Ćć¨FĽžńżÕŃČőĶńďŌ∂»”^úy°£–¬ĹŁ—–÷∆ĶńīĻĺÄ”^úyÉx≤…”√ĺÄÍáCCD āųł–∆ų,Ćć¨FŃň◊xĒĶ◊‘Ą”ĽĮ°£‘ŕx , y ∑ĹŌÚ…ŌĶń◊Ýėň◊ÉĽĮ÷Ķ≤…ľĮĺę∂»Éě”ŕ±011 mm
1.5 °°ĺę√‹ĆßĺÄ∑®
ĻįČőĶńňģ∆ĹőĽ“∆ĪOúy≥£≤…”√ĺę√‹ĆßĺÄúyŃŅ∑®°£īň∑®Ď™”√›^읏V∑ļ,ĶęŃŅŖÖĻ§◊ųŃŅīů,Ĺ«∂»”^úy ‹Ň‘’ŘĻ‚”įŪĎ›^īů°£ěťīň,Ņ…≤ľ‘O≥…Óźň∆”ŕłŖń‹őÔņŪľ”ňŔ∆ųĻ§≥Ő÷–ĶńúyłŖ÷Ī…ž≠h–őĺW,Õ®Ŗ^úyŃŅ™MťL»żĹ«–őĶńŖÖťLļÕłŖĶńÕĺŹĹ,ĀŪťgŔՊłŖúyĹ«ĺę∂»°£‘ď∑®Ķńĺę∂»»°õQ”ŕŃŅŖÖĺę∂»,»ÁĻŻ”√„üšďĺÄ≥ŖŃŅŖÖ,ĽÚME5000 úyĺŗÉxúyŖÖ,ĺę∂»ÕÍ»ęŅ…“‘Ŗ_ĶĹĀÜļŃ√◊ľČ°£
1.6 °°«į∑ĹĹĽēĢ∑®
‘ŕłų∑NňģĻ§Ĺ®÷ĢőÔĶń ©Ļ§ŽA∂őĽÚ“—Ĺ®≥…ĶńĻįČőŌ¬”ő√ś°ĘĻįĻŕĶ»”^úy–߬ ›^ĶÕ«“”^úyēr≤Ľ“◊÷ĪĹ”ĶĹŖ_Ķń≤ŅőĽ,Ņ…“‘”√úyŖÖ°ĘúyĹ«ĽÚŖÖĹ««į∑ĹĹĽēĢ∑®úy∂®∆šňģ∆ĹőĽ“∆°£«į∑ĹĹĽēĢ∑®”…”ŕ ‹úyĹ«’`≤Ó°ĘúyŖÖ’`≤Ó°ĘĹĽēĢĹ«ľįąD–őĹYėč°ĘĽýĺÄťL∂»°ĘÕ‚ĹÁólľĢĶń◊ÉĽĮĶ»“Úňō”įŪĎ,ĺę∂»›^ĶÕ,“Ľį„ěť±(1°ę3) mm°£ŃŪÕ‚,∆š”^úyĻ§◊ųŃŅ›^īů,”čň„Ŗ^≥Ő›^ŹÕŽs,Ļ ≤ĽÜő™ö Ļ”√,∂Ý «≥£◊ųěťāš”√ ÷∂őĽÚŇšļŌ∆šňŻ∑Ĺ∑® Ļ
”√°£
2 °°īĻ÷ĪőĽ“∆ĪOúy
īĻ÷ĪőĽ“∆ĪOúyĶń÷ų“™∑Ĺ∑®”–é◊ļőňģú ∑®ļÕŃųůwžoѶňģú ∑®(ŖBÕ®Ļ‹∑®) °£
2.1 °°é◊ļőňģú ∑®
é◊ļőňģú ∑® «īĻ÷ĪőĽ“∆ĪOúyĶń≥£”√∑Ĺ∑®,ĺę∂»»›“◊ĚM◊„,Ķę÷ų“™ÜĖÓ} «»ÁļőĆć¨F”^úy◊‘Ą”ĽĮ°£ńŅ«į,ĺŖ”–◊‘Ą”≤…ľĮ°ĘɶīśŔYŃŌĶńŽä◊”ňģú Éx“—‘ŕ…ķģa÷– Ļ”√,∆šĺę∂»Ņ…Ŗ_±(013°ę014) mm (√Ņ«ß√◊Õý∑ĶúyłŖ≤Ó÷–ĒĶĶń÷–’`≤Ó) ,Ļ§◊ų–߬ √ųÔ@ŐŠłŖ°£
2.2 °°ŃųůwžoѶňģú ∑®
ŃųůwžoѶňģú ∑®úyŃŅ‘≠ņŪ «ŖBÕ®Ļ‹‘≠ņŪ°£‘ď∑®ļ‹»›“◊Ćć¨F◊xĒĶľįāų›ĒĶń◊‘Ą”ĽĮ,úyŃŅĺę∂»Éě”ŕ±011 mm ,‘ŕīĻ÷ĪőĽ“∆ĪOúy÷–”–÷ÝŹV∑ļĶńĎ™”√°£ĶęžoѶňģú ĶńúyŁcĽýĪĺ…Ō“™Őé”ŕÕ¨“Ľňģ∆ĹőĽ÷√,łŖ≤ÓúyŃŅ∑∂áķ›^–°°£ĹŁńÍĀŪ—–÷∆ť_įl≥ŲŃňÕ®Ŗ^ČļѶāųł–∆ųúyŃŅ“ļůwČļѶĶń◊ÉĽĮĀŪ”čň„łŖ≤Ó◊ÉĽĮĶń
Éx∆ų,ĒUīůŃňúyŃŅ∑∂áķ°£
3 °°»żĺSőĽ“∆ĪOúy
“‘…Ōłų∑NĪOúy∑Ĺ∑® «ĆĘ◊É–őŁcĶńňģ∆ĹőĽ“∆ļÕīĻ÷ĪőĽ“∆∑÷Ąe ©úy,úyŃŅ≥…ĻŻ≤ĽĺŖ”–Õ¨ēr–‘,ĹĶĶÕŃň≥…ĻŻĶńŅ∆ĆW–‘ļÕ Ļ”√Ér÷Ķ,∂Ý«“≤…”√≥£“é∑Ĺ∑®”^úy÷‹∆ŕťL,üo∑®ĆćērĶōŃňĹ‚īůČőĶń◊É–ő«ťõr°£ńŅ«į“——–÷∆≥Ų“Ľ∑Nń‹ĆćērŖBņm”^úy◊É–őŁcňģ∆ĹőĽ“∆ļÕīĻ÷ĪőĽ“∆ĶńúyŃŅŌĶĹy,”…”ŕīňŌĶĹyúyŃŅĶń «◊É–őŁcĶń»żĺSőĽ“∆÷Ķ,Ļ ∑Qěť“»żĺSőĽ“∆ĪOúyŌĶĹy”,įī∆š‘≠ņŪļÕ”^úy∑Ĺ∑®Ņ…∑÷ěťėO◊Ýėň∑®°ĘĺŗŽxĹĽēĢ∑®°ĘGPS ∑®°£
3.1 °°ėO◊Ýėň∑®
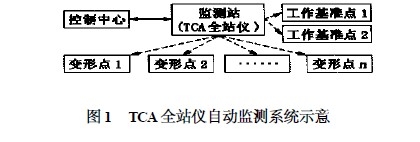
‘ď∑®≤…”√ģĒ«įĺŖ”–◊ÓłŖĺę∂»ĶńúyŃŅôC∆ų»ňŖM––◊ųėI°£»ÁŹ∆Ņ®TCA ŌĶŃ–»ę’ĺÉx,∆šėň∑Qĺę∂»úyĹ«ěť±015″,úyĺŗěť±(1 mm + 1 ppm·D) ,‘ďÉx∆ųń‹◊‘Ą”ň—ňų°Ę’’ú ńŅėň,Ćć¨FĹ«∂»°ĘĺŗŽxúyŃŅ◊‘Ą”ĽĮ,∆šúyŃŅ‘≠ņŪ «ėO◊Ýėň∑®°£‘ďŌĶĹyĶńėňú Ňš÷√įŁņ®TCA »ę’ĺÉx°ĘAPSWIN ‹õľĢļÕłŖĺę∂»ĒĶőĽ Ĺúō∂»”č°Ęö‚Čļ”č°£īňŌĶĹy“—≥…Ļ¶ĶōĎ™”√”ŕŌ„łŘĺŇżąŐŃĶōŤFňŪĶņŖ\†IĪOúy,–¬ľ”∆¬ĶōŤFĻęňĺ“—ĆĘ∆š◊ųěť≥£“é—bāš”√”ŕĶōŤFĪOúy°£TCA »ę’ĺÉx◊‘Ą”ĪOúyŌĶĹyĶńėč≥…»ÁąD1 ňý ĺ°£
3.2 °°ĺŗŽxĹĽēĢ∑®
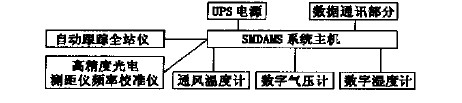
‘ď∑®”…÷–ńŌĻ§ėIīůĆWŹąĆW«fĹŐ ŕŐŠ≥Ų,∆š»ę∑Qěť“SM2DAMS ĀÜļŃ√◊ľČĺę∂»īůČő◊É–ő◊‘Ą”ĪOúyŌĶĹy”,‘ŕőŚŹäŌ™īůČő”–≥…Ļ¶ĶńĎ™”√°£ĻP’Ŗ’Jěť,ƶ”ŕúyĹ«ėň∑Qĺę∂»ěť±015″,úyĺŗėň∑Qĺę∂»ěť±(1 mm + 1 ppm·D) Ķń◊‘Ą”łķŘô»ę’ĺÉx,”…”ŕīůö‚’Ř…šŇc◊‘Ą”’’ú ’`≤ÓĶń”įŪĎ,ĆćŽHúyĹ«ĺę∂»ěť±2″,úyĺŗĺę∂»ĹĶěť4 ×10 - 6 ,≤Ľń‹Ćć¨FīůČőĪOúyňý“™«ůĶńĀÜļŃ√◊ľČĺę∂»°£Ĺ‚õQřk∑® «:≤Ľ”√Ĺ«∂»–ŇŌĘ,÷Ľ”√ĺŗŽx–ŇŌĘ;ƶĺŗŽx–Ň ©ľ”łų∑Nłń’ż, Ļ∆šŖ_ĶĹĀÜļŃ√◊ľČ°£÷ų“™≤ĹůE»ÁŌ¬: ĘŔ”√úyŖÖļÕ»żŖÖĹĽēĢ∑®ī_∂®◊É–őŁcĶń»żĺS◊Ýėň; Ęŕ”√Ól¬ –£ú Éx°ĘłŖ∑Ä∂®∂»łŖĺę∂»úō∂»”č°Ęö‚Čļ”čŇcĚŮ∂»”čĶ»,ƶňýúyŖÖťL ©ľ”Ól¬ łń’żļÕö‚Ōůłń’ż; ĘŘ”√◊‘Ą”÷‹»’”^úyľľ–gúy∂®īůö‚
īķĪŪ–‘’`≤ӓ鬅,Ōų»űīůö‚īķĪŪ–‘’`≤ÓĶń”įŪĎ°£Õ®Ŗ^Ŗ@–©łń‘ž,ŌĶĹy◊ÓĹKĶńúyĺŗĺę∂»ěť±[ 012 mm + (013°ę014) ppm·D] ,Ņ…“‘Ćć¨F1 km◊ů”“ĺŗŽx…ŌĀÜļŃ√◊ľČĶńĪOúyĺę∂»,‘ŕń≥–©ąŲļŌ»°īķME5000 úyĺŗÉx[ ±(012 mm + 012ppm·D) ] ,Ô@ ĺ≥ŲłŁłŖĶń–‘ń‹ÉrłŮĪ»°£
‘ďŌĶĹyĶńėňú Ňš÷√įŁņ®3 Ő◊łŖĺę∂»◊‘Ą”úyĺŗŌĶĹy(∆šėč≥…“äąD2) °ĘĒĶďĢÕ®–Ň‘Oāš°Ę∑ī…šņ‚ÁRĹM°ĘŌĶĹy‹õľĢ°Ę÷–—ŽŅō÷∆ “÷ų”čň„ôCĶ»°£
3.3 °°GPS ∑®
‘ďŌĶĹy”…őšĚhúyņLŅ∆ľľīůĆWÕÍ≥…,”√”ŕ«ŚĹ≠łŰļ”érňģéžīůČőĪOúy°£GPS úyŃŅ≤Ľ–Ť“™úyŃŅŁcťgÕ®“ē,Ķę“™«ůƶŅ’Õ®“ē°£‘ŕ1 km◊ů”“Ķń∂ŐĽýĺÄ…Ō, GPS úyŃŅŅ…“‘ę@Ķ√ĀÜļŃ√◊ľČĶńŌŗƶ∂®őĽĺę∂»°£‘ďŌĶĹy÷ų“™”–ĒĶďĢ≤…ľĮ°ĘŅāŅō°ĘĒĶďĢŐéņŪ°Ę∑÷őŲ°ĘĻ‹ņŪőŚīůń£ČK°£ĒĶďĢ≤…ľĮ≤Ņ∑÷įŁņ®2 āÄĽýú Łc,5 āÄ◊É–őŁc,Ļ≤”–7 Ň_Ashtech Z - 12 Ĺ” ’ôC;”…”ŕĒĶďĢāų›ĒŃŅ∑«≥£īů,Ļ ≤…”√ĺ÷”ÚĺWāų›Ē°£ĒĶďĢŐéņŪĹYĻŻ”–l°ę2 h Ĺ‚ļÕ6 hĹ‚,1°ę2 h ”^úyĶńňģ∆Ĺĺę∂»Éě”ŕ±110 mm ,īĻ÷Īĺę∂»Éě”ŕ±115 mm;6 h ”^úyĶńňģ∆Ĺĺę∂»Éě”ŕ±015 mm ,īĻ÷Īĺę∂»Éě”ŕ±110 mm;∂ÝGPS ň≤ēr”^úyĶńňģ∆ĹőĽ“∆ĺę∂»ěť±(3°ę5) mm ,īĻ÷ĪőĽ“∆ĺę∂»ěť±8 mm°£
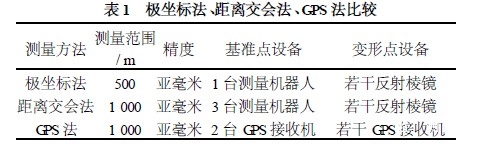
‘ďŌĶĹyń‹ČÚĆć¨F◊‘Ą”ŖBņm”^úy,ĺę∂»łŖ,Ķę”–“‘Ō¬»ĪŁc–Ť“™Ņň∑Ģ: ĘŔ≤Ľń‹ĆćērĶ√ĶĹłŖĺę∂»Ķń◊É–ő÷Ķ; Ęŕ”^úyŁcĪōŪöƶŅ’ť_ťü,Ĺ” ’–l–«≤Ľń‹…Ŕ”ŕ4 Ów; ĘŘ√Ņ‘Ųľ”1 āÄ”^úyŁcĺÕĪōŪöŐŪľ”1 Ň_GPS Ĺ” ’ôC,≥…Īĺ›^łŖ°£“‘…ŌňýĹťĹBĶń3 ∑N»żĺSÕ‚≤Ņ◊É–őĪOúy∑Ĺ∑®łų”–Éě»ĪŁc,ĺę∂»ľįňý–Ť‘OāšĪ»›^“äĪŪ1°£
–°ņňĶ◊īůČőÕ‚≤Ņ◊É–ő”^úy‘O”č÷ų“™≤…”√“ēú ĺÄ∑®,”…”ŕČőůwżčīů°Ę“ēĺÄ›^ťL,“ēú ĺÄ”^úyŽy“‘ĚM◊„ĺę∂»“™«ů°£ Ļ”√úyŃŅôC∆ų»ň(TCA ŌĶŃ–) ‘ŕ–°ņňĶ◊īůČő…ŌŖM––◊É–ő”^úy,Ņň∑ĢŃň‘≠“ēú ĺÄ”^úy∑Ĺ∑®Ķń»ĪŌ›°£”…Ź∆Ņ®TCA ŌĶŃ–Ķń»ę’ĺÉxŇšāšAPSWIN ‹õľĢėč≥…Ńň◊‘Ą”ėO◊ÝėňúyŃŅŌĶĹy,Ņ…“‘Ćć¨Füo»ň÷Ķ ōľį◊‘Ą”ŖM––ĪOúyÓAąů°£ňŁń‹ČÚ◊‘Ą”ŖM––’Ż∆Ĺ°Ę’{ĹĻ°Ę’żĶĻÁR”^úy°Ę’`≤Ółń’ż°Ę”õšõ”^úyĒĶďĢ,īůīůŐŠłŖŃňĻ§◊ų–߬ ,≤Ę»°Ķ√ŃňĚM◊„“é∑∂“™«ůĶńŅ…ŅŅ”^úyŔYŃŌ°£łų◊É–őŁc√Ņ÷‹∆ŕĶń»żĺS◊ÝėňŅ…įīėO◊Ýėň”čň„Ļę Ĺ«ůĶ√:
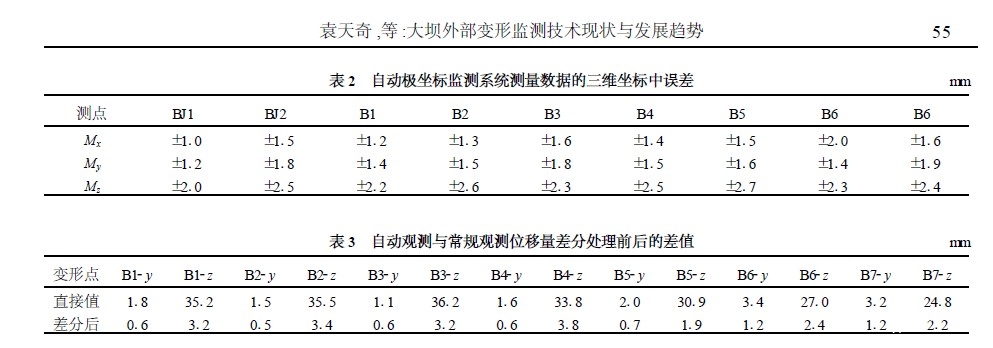
‘ŕ√Ņ∆ŕúyŃŅēr,APSWIN ‹õľĢŅ…łýďĢ6 āÄúyĽōĶń”^úyĒĶďĢ”čň„≥ŲĆćŽHúyŃŅērĶńĹ«∂»ĺę∂»mHZ °Ęmα(″) ļÕĺŗŽxúyŃŅĺę∂»md (mm) ,įīėO◊ÝėňĻę Ĺ«ů≥ŲĶń◊É–őŁcĶń»żĺS◊Ýėň’`≤Ó∑÷ĄeěťmXp °ĘmYp °ĘmZp (mm) (»żĺS◊Ýėň’`≤ÓĶń”čň„Ļę Ŭ‘) °£łýďĢ◊‘Ą”ėO◊ÝėňĪOúyŌĶĹyĶńúyŃŅĒĶďĢŖM––∑÷őŲ°ĘĹy”č,Ķ√≥ŲłųúyŁcĶń»żĺS◊Ýėň’`≤Ó,ĹYĻŻ“äĪŪ2 (ĪŪ÷–Ĺo≥ŲĶń÷–’`≤Óěť∆Ĺĺý÷Ķ) °£Ņ…“‘Ņī≥Ų,TCA »ę’ĺÉxúyŃŅ◊É–őŁcĶńx °Ęy °Ęz ◊ÝėňĶń÷–’`≤Óĺý‘ŕ±2 mm ◊ů”“,ÕÍ»ęĚM◊„ÕŃ( Į) Čőį≤»ęĪOúyĶńĺę∂»“™«ů°£
ěťŃňôzÚěúyŃŅôC∆ų»ň◊‘Ą”ĪOúyĶńĺę∂»,ő“āÉ”√◊‘Ą”ĽĮ”^úyĶń÷ĪĹ”ĹYĻŻļÕĹõŖ^≤Ó∑÷ŐéņŪĶńĹYĻŻ∑÷ĄeŇc≥£“éúyŃŅ∑Ĺ∑®(‘ŕĽýú Łc∑÷Ąe‘O’ĺ”√TC2002 »ę’ĺÉxįīŖÖĹ«ĹĽēĢ∑®úyŃŅ6úyĽō,”čň„◊É–őŁcĶńňģ∆ĹőĽ“∆,”√é◊ļőňģú úyŃŅōQŌÚőĽ“∆) ĶńĹYĻŻŖM––ƶĪ»∑÷őŲ,łųŪóĺę∂»÷łėňĺýĚM◊„īůČőį≤»ęĪOúy“é∑∂Ķń“™«ů°£
◊‘Ą”ėO◊Ýėň≤Ó∑÷ŐéņŪĶńĽýĪĺ‘≠ņŪ «:√Ņ“ĽāÄúyŃŅ÷‹∆ŕĺýįīėO◊ÝėňĶń∑Ĺ∑®úyŃŅĽýú ŁcļÕ◊É–őúyŁcĶń–Īĺŗ°Ęňģ∆ĹĹ«ļÕīĻ÷ĪĹ«,ĆĘĽýú ŁcĶńúyŃŅ÷ĶŇc∆šĽýú ÷Ķ(Ľýú ĺWĶńúyŃŅ÷Ķ) ŌŗĪ»,«ůĶ√≤Ó÷Ķ,Ŗ@“Ľ≤Ó÷ĶŅ…“‘’Jěť « ‹īůö‚ČļѶ°Ęúō∂»ľįÉx∆ųĶ»łų∑N“Úňō”įŪĎĶńĹYĻŻ°£◊‘Ą”ĽĮúyŃŅŅ…“‘‘ŕ∂ŐērťgÉ»(10min) ÕÍ≥…“ĽāÄ÷‹∆ŕĶńúyŃŅ,Ņ…“‘’JěťŖ@–©“ÚňōƶĽýú ŁcļÕ◊É–őŁcĶń”įŪĎ «ŌŗÕ¨Ķń,Ņ…“‘į—Ľýú ŁcĶń≤Óģźľ”ĶĹ◊É–őŁcĶń”^úy÷Ķ…ŌŖM––≤Ó∑÷ŐéņŪ,”čň„◊É–őŁcĶń»żĺSőĽ“∆ŃŅ°£”…”ŕ”^úyólľĢŌŗÕ¨,ņŻ”√Ľýú ŁcňýŐŠĻ©Ķńłń’żĒĶŅ…“‘ŌŻ≥żĻ≤Õ¨’`≤Ó,īů∑ý∂»ŐŠłŖ◊É–őĪOúyĺę∂»°£”√≤Ó∑÷ŐéņŪłń’ż«įļůĶńĹYĻŻŃ–”ŕĪŪ3°£”…ĪŪ3 Ņ…“‘Ņī≥Ų,łųŁcĶńĺę∂»īůěťŐŠłŖ,”»∆š «łŖ≥Ő
( z) Ķńĺę∂» ‹ö‚ŌůļÕīĻ÷Ī’ŘĻ‚Ķń”įŪĎĶ√ĶĹŃňļ‹ļ√Ķńłń’ż°£Źń–°ņňĶ◊īůČőÕ‚≤Ņ◊É–őTCA ◊‘Ą”ĽĮĪOúyĶń«ťõrŅ…“‘Ņī≥Ų,úyŃŅôC∆ų»ň”√”ŕīůČőÕ‚≤Ņ◊É–őĪOúyŅ…“‘Ćć¨F»ę◊‘Ą”ĽĮ,”–ŹV∑ļĶńĎ™”√«įĺį°£Ňc≥£“é∑Ĺ∑®ŌŗĪ»›^ňŁĺŖ”–“‘Ō¬ÉěŁc:
(1) úyŃŅ∑ĹįłŌ»ŖM,ŌĶĹyĹM≥…ļŌņŪ°£‘ŕīůČőĪOúyĽýú ĺWĶńĽýĶA…Ō,≤…”√≤Ó∑÷ŐéņŪŅ…ŌŻ≥żļÕúp»űłų∑N’`≤ÓƶúyŃŅĹYĻŻĶń”įŪĎ,īů∑ý∂»ŐŠłŖúyŃŅĺę∂»≤ĘŅ…Õ¨ērę@Ķ√√ŅāÄ◊É–őŁcĶń∆Ĺ√śļÕīĻ÷ĪőĽ“∆–ŇŌĘ°£
(2) ◊‘Ą”ĽĮ≥Ő∂»łŖ,Ņ…ŅŅ–‘Źä°£ŌĶĹyŅ…“‘Ćć¨F◊‘Ą”ĪOúy,≤ĘŅ…ĆćērŖM––ĒĶďĢŐéņŪ°Ę∑÷őŲ,ąůĪŪ›Ē≥Ų°£
(3) ĪOúyňŔ∂»Ņž°Ęēr–ß–‘Źä°£ÕÍ≥…“ĽāÄ÷‹∆ŕĶńĪOúyĻ§◊ų,ÉHľs–Ť10 min°£
(4) ĺS◊o∑ĹĪ„°ĘŖ\––≥…ĪĺĶÕ°£»ę’ĺÉx◊‘Ą”ėO◊ÝėňúyŃŅŌĶ
5 °°ĹY°°’Z
ĺC…Ōňý Ų,īůČőÕ‚≤Ņ◊É–őĪOúyĹõövŃňŹńĶÕĺę∂»ĶĹłŖĺę∂»,ĒĶďĢ≤…ľĮ∑Ĺ∑®Źń»ňĻ§úy◊xĶĹ◊‘Ą”≤…ľĮ,ňģ∆ĹŇcīĻ÷ĪőĽ“∆”…∑÷Ąe ©úyĶĹ»żĺS◊É–őĪOúyĶńįl’Ļ,Źń∂ÝŅ…“‘ÓA”č,īůČőį≤»ęĪOúyľľ–gĶńįl’Ļ∑ĹŌÚ «łŖĺę∂»◊‘Ą”ĽĮ°£Õ¨ēr,ŽS÷ÝőĘŽä◊”°Ę”čň„ôC°ĘĽ•ŖBĺWŇcĆíéßĺW¨Fīķ–ŇŌĘľľ–gĶńįl’Ļ,ěťį≤»ęĪOúyŌĶĹyĶń◊‘Ą”ĽĮ°ĘľĮ≥…ĽĮ°Ę÷«ń‹ĽĮĶž∂®Ńňą‘ĆćĶńľľ–gĽýĶA, Ļ∆š‘ŕĻ¶ń‹°Ę–‘ń‹°ĘŅ…ŅŅ–‘Ķ»∑Ĺ√śĪōĆĘłŁľ”ÕÍ…∆°£
[1 ] °°ŕw÷ĺ» ,Ķ»1 īůČőį≤»ęĪOúy‘O”čŇc ©Ļ§ľľ–gĶń∑÷őŲ—–ĺŅ[J ]1 īů
Čő”^úyŇcÕŃĻ§úy‘á,200l ,25 (1) :28 - 321
[2 ] °°Íź”ņ∆ś,Ö«◊”į≤,Ö«÷–»Á1 ◊É–őĪOúy∑÷őŲŇcÓAąů[M]1 ĪĪĺ©:úy
ņL≥Ųįś…Á,19981
[3 ] °°ŮTŃ÷1 ’śŅ’ľ§Ļ‚ú ÷ĪĪOúyīůČő◊É–őŌĶĹy[J ]1 īůČő”^úyŇcÕŃĻ§
úy‘á,1999 ,23(5) :39 - 421
[4 ] °°Ö«áÝÁO1CCD āųł–∆ų‘ŕőĽ“∆úyŃŅ÷–ĶńĎ™”√[J ]1 Ķōö§–ő◊ÉŇcĶō
’ū,1998 ,18(3) :92 - 961
[5 ] °°ŹąĆW«f,ÕűźŘĻę,ŹąŮY1 Üő≤®łŖĺę∂»úyĺŗŌĶĹyĶń—–ĺŅ[J ]1 úyņL
ĆWąů,1996 ,25(3) :186 - 1901